
The injective (or direct) limit of C*-algebras is one way to construct new C*-algebras from directed system of C*-algebras (defined below), and is an essential tool in operator theory, so one may as well get acquainted with it. The projective limit (or inverse limit) is not as common it seems, but I will add it here for completeness. In this post I will try to give a definition of the construct by universal properties of colimits in the category of C*-algebras, but reducing the prerequisites from category theory to a bare minimum. The point is to highlight that similarities between direct limits of groups, rings, algebras etc., stems from the fact that they all solve the same universal problem in their respective categories, and to justify why some of these limits/colimits are preserved under certain transformations. Though the similarities may be evidenced, this is understandably (but also unfortunately) often not addressed in the classical references of operator theory, as a formal definition of a limit/colimit would be a significant digression.
Preliminaries
First we will need to get our hands dirty with some categorical definitions, whilst keeping things slightly informal. For nets or sequences, one starts with a map that assigns to each element in the index set, an element in some topological space. Completely analogously, if we want to define a notion of limits in a category  , one first defines an “index set”, or rather index category, and determines a function, or rather a functor, from this index category to into . This is called a diagram in , and is what one uses to define a limit. By an abuse of terminology, and to make the definition as “functor-free” as possible, I will often refer to the objects in the diagram as the diagram.
, one first defines an “index set”, or rather index category, and determines a function, or rather a functor, from this index category to into . This is called a diagram in , and is what one uses to define a limit. By an abuse of terminology, and to make the definition as “functor-free” as possible, I will often refer to the objects in the diagram as the diagram.
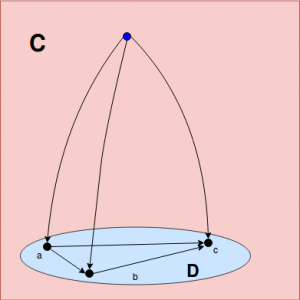
Next we need the notion of a cone. A cone over a diagram  in a category is an object
in a category is an object  in with a collection of “projection” morphisms
in with a collection of “projection” morphisms  from to each element
from to each element  in the diagram, such that if
in the diagram, such that if  is a morphism in the diagram , then
is a morphism in the diagram , then  . The name stems from the usual depiction of a cone as in the diagram below, and the condition on the projection maps is equivalent to the requirement that each triangle not entirely contained in commutes.
. The name stems from the usual depiction of a cone as in the diagram below, and the condition on the projection maps is equivalent to the requirement that each triangle not entirely contained in commutes.
An analogous (or dual) notion of a cone is a co-cone, which is just like a cone in which all the arrows not entirely contained in the diagram are reversed. That is, a co-cone is an object together with a family of “inclusion” morphisms  , one for each object
, one for each object  , satisfying, for each morphism
, satisfying, for each morphism  between objects in , the equality
between objects in , the equality
![\[\iota_x = \iota_y \circ f.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-7701f96c98c81a6ba050248ab6a7ffb6_l3.png "Rendered by QuickLaTeX.com")
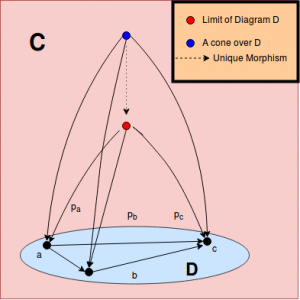
Among all cones over a diagram one can choose (if it exists) a special cone which is universal in the sense that any other cone factors uniquely through it. More precisely, if  is this universal cone over , and
is this universal cone over , and  is any other cone over the diagram , then there exists a unique morphism
is any other cone over the diagram , then there exists a unique morphism  such that
such that  (see the picture below). This universal cone is what is referred to as the limit of the diagram . Convince yourself this limit is unique (up to unique isomorphism).
(see the picture below). This universal cone is what is referred to as the limit of the diagram . Convince yourself this limit is unique (up to unique isomorphism).
There is also a universal co-cone, which is what is called a colimit in  . It is uniquely determined (if it exists) as the object in and the family of morphisms
. It is uniquely determined (if it exists) as the object in and the family of morphisms  from
from  to , by the requirement that for every other co-cone , there exists a unique morphism
to , by the requirement that for every other co-cone , there exists a unique morphism  such that
such that  .
.
The category of C*-algebras, like the category  of Banach spaces with contractive maps as morphisms, is complete and co-complete, meaning that all diagrams which are not too large, have limits and colimits. Not too large here means that the index category can be treated as a set and not a class. I will adhere to the following quite standard notation throughout this post:
of Banach spaces with contractive maps as morphisms, is complete and co-complete, meaning that all diagrams which are not too large, have limits and colimits. Not too large here means that the index category can be treated as a set and not a class. I will adhere to the following quite standard notation throughout this post:
(1) 
Lastly, it should be mentioned that the above definition is often stated by means of natural transformations of functors. Now enough of this abstract extravagances, let’s get back to the task at hand.
In the next two sections a concrete realization of a colimit and a limit will be defined in cases where the index category is an upward directed set, for some basic categories like sets, topological spaces and most algebraic objects. The proofs of universality will not be supplied in these sections. The third section will deal with limits and colimits of C*-algebras.
Projective Limits (or Inverse Limits)
Among all limits and colimits, two pop up all the time, the injective (or Direct or Inductive) limit, which is a colimit, and the projective (or inverse) limit, which is a limit. They are characterized by the structure of their index category. Unfortunately the terminology does vary, so be on the alert. Let’s define the projective limit first, as this is somewhat simpler to define.
Let  be a net of objects in a category
be a net of objects in a category  and assume there is a family of morphisms of morphisms
and assume there is a family of morphisms of morphisms  whenever
whenever  , such that
, such that


then the the net  together with the family of morphisms
together with the family of morphisms  is called an inverse system (this is a special type of diagram in ). The second condition above captures the idea of being “path independent”. When the index set is linearly ordered one usually define the morphisms for each consecutive index, and drops the above condition, as there is only one path between two indices. The limit over this system is called the projective (or inverse) limit of the system, and is denoted
is called an inverse system (this is a special type of diagram in ). The second condition above captures the idea of being “path independent”. When the index set is linearly ordered one usually define the morphisms for each consecutive index, and drops the above condition, as there is only one path between two indices. The limit over this system is called the projective (or inverse) limit of the system, and is denoted
![\[\varprojlim (\mathcal{A}_i, f_{i,j}).\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-7fab9b3bcf0fd70fdeec0012caeb34ae_l3.png "Rendered by QuickLaTeX.com")
The name “inverse limit” is justified by the fact that the morphisms  point in the direction of “decreasing” indices. The name “projective limit” stems from the fact that this is a limit in the categorical sense, hence is equipped with a family of “projections”
point in the direction of “decreasing” indices. The name “projective limit” stems from the fact that this is a limit in the categorical sense, hence is equipped with a family of “projections”
![\[p_r: \varprojlim (\mathcal{A}_i, f_{i,j}) \to \mathcal{A}_r.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-17c4de1b2c8381a849f447b826b56824_l3.png "Rendered by QuickLaTeX.com")
The intuition behind the construction is that the projective limit defines an object by piecing together the collection  and using the family of morphisms to define (and identify) the “overlap”.
and using the family of morphisms to define (and identify) the “overlap”.
For many algebraic objects (rings, groups, (left/right) R-modules, etc ), topological space or sets, one has a concrete realization of the projective limit, given as as follows. In the category of sets the limit is defined as the set,
![\[\varprojlim (\mathcal{A}_i, f_{i,j}) = \{ (a_i) \subset \prod_{i\in I} \mathcal{A_i}~ | ~ a_j = f_{i,j}(a_i) \text{ for all } i\prec j \}\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-1e633d44f13e15fe85040993368b83c7_l3.png "Rendered by QuickLaTeX.com")
with projections  given as the usual coordinate projections
given as the usual coordinate projections  . For algebraic objects, this set can be made to inherit the algebraic structure form the
. For algebraic objects, this set can be made to inherit the algebraic structure form the  ‘s by pointwise operations, making the projections
‘s by pointwise operations, making the projections  morphisms in the corresponding category. For topological spaces, the set theoretic limit is endowed with the weak topology induced by the projection maps . All these objects can be shown to be universal (as defined above) in their respective categories.
morphisms in the corresponding category. For topological spaces, the set theoretic limit is endowed with the weak topology induced by the projection maps . All these objects can be shown to be universal (as defined above) in their respective categories.
Injective limits / Direct limits / Inductive limits
Completely analogously to the projective limit, with a net of objects in a category assume there is a family of morphisms  for each (note that we now map in the direction of increasing indices!), satisfying the following conditions
for each (note that we now map in the direction of increasing indices!), satisfying the following conditions

Then the net  together with the family of morphisms
together with the family of morphisms  is called a directed system of objects in
is called a directed system of objects in  The colimit of this system is called the injective limit (or direct limit, or inductive limit) and is denoted
The colimit of this system is called the injective limit (or direct limit, or inductive limit) and is denoted
![\[\varinjlim (\mathcal{A}_i, f_{i,j}).\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-ba8b765e09b913144dcc8f5d544145f6_l3.png "Rendered by QuickLaTeX.com")
Again, there is no fixed terminology, and one needs to determine from the context what the author means when he/she uses these terms. Similarly to the projective limit, one has a concrete realization of the injective limit for most algebraic objects (groups, rings, (left/right) R-modules, etc.), sets and topological spaces given as follows.
Let  be the disjoint union of all ‘s, and define an equivalence relation on
be the disjoint union of all ‘s, and define an equivalence relation on  by
by
![\[a \sim b \qquad \text{ if there exists a } k\in I \text{ such that } f_{i,k}(a) = f_{j, k}(b)\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-d65d8a0417821aecacd3db796db95b78_l3.png "Rendered by QuickLaTeX.com")
where we have tacitly assumed  ,
,  and we have identified and
and we have identified and  with their image in . The quotient
with their image in . The quotient  , together with the inclusion maps
, together with the inclusion maps  sending
sending  to the equivalence class in
to the equivalence class in  containing , forms a co-cone over the directed system, which can be shown to be the colimit in the category of sets. This is the (set theoretic) injective limit of the system.
containing , forms a co-cone over the directed system, which can be shown to be the colimit in the category of sets. This is the (set theoretic) injective limit of the system.
For algebraic objects we would like the set theoretic injective limit to inherits the algebraic structure from the ‘s. This is done in the following way: Let  and
and  be such that
be such that  (here we finally need the index set to be directed). We define an operation
(here we finally need the index set to be directed). We define an operation
![\[\cdot: \mathcal{A} \times \mathcal{A} \to \mathcal{A}\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-bdd78fc26ed091c5306cf73e9557f486_l3.png "Rendered by QuickLaTeX.com")
by  , where the later
, where the later  is the operation in the object
is the operation in the object  . It is not that hard to verify that this operation is well defined on (i.e. independent of choice of and representatives
. It is not that hard to verify that this operation is well defined on (i.e. independent of choice of and representatives  ). The resulting object is the injective limit of the system.
). The resulting object is the injective limit of the system.
For topological spaces, one endows with strong (or final) topology induced by the inclusion maps  . That is the finest or strongest topology for which all ‘s are continuous.
. That is the finest or strongest topology for which all ‘s are continuous.
We conclude this section by a introducing a notion of isomorphisms om directed systems. A directed system  and
and  are said to be isomorphic if there exists a family of isomorphisms
are said to be isomorphic if there exists a family of isomorphisms  such that for each the following diagram commutes
such that for each the following diagram commutes
![\[\newcommand{\ra}[1]{\!\!\!\!\!\!\!\!\!\!\!\!\xrightarrow{\quad#1\quad}\!\!\!\!\!\!\!\!} \newcommand{\da}[1]{\left\downarrow{\scriptstyle#1}\vphantom{\displaystyle\int_0^1}\right.} % \begin{array}{llll} \mathcal{A}_i & \ra{f_{i, j}} &\mathcal{A}_{j} \\ \da{\phi_i} & & \da{\phi_j} \\ \mathcal{B}_i & \ra{g_{i, j}} &\mathcal{B}_{j} \\ \end{array}\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-b260efa7f8aa230b451dc920994799ec_l3.png "Rendered by QuickLaTeX.com")
A completely analogous definition exists for inverse systems. As one would expect, isomorphic directed (or inverse) systems have isomorphic colimits (or limits), but there may be non-isomorphic directed systems (inverse systems) which have isomorphic injective limits (projective limits).
Now that we have a gist of how projective and injective limits are formed for algebraic objects, most of the heavy lifting has already been done, and we are ready to turn our attention to C*-algebras.
Injective/Projective limits of C*-algebras
Let  be a directed system of C*-algebras and the injective limit of the underlying algebras (see the previous section). If
be a directed system of C*-algebras and the injective limit of the underlying algebras (see the previous section). If  is the equivalence class of the element
is the equivalence class of the element  , one defines a C*-seminorm
, one defines a C*-seminorm
![\[||a|| = \lim_{j>i } || f_{i, j}(a) ||.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-2fb3ede1b5b8ef22acb1210eeaeeab80_l3.png "Rendered by QuickLaTeX.com")
It is well defined since the maps are all norm decreasing. Lifting this to the quotient space  we have a C*-norm. The injective limit of the directed system is defined as the C*-algebra given by the completion of with respect to this norm.
we have a C*-norm. The injective limit of the directed system is defined as the C*-algebra given by the completion of with respect to this norm.
The above defined C*-algebra
, together with the natural inclusion maps  sending to its equivalence class in , is the colimit of the directed system , that is
sending to its equivalence class in , is the colimit of the directed system , that is
![\[\mathcal{A} = \varinjlim (\mathcal{A}_i, f_{i,j}).\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-0f20dde2a9bd049faa77d78d572aa34d_l3.png "Rendered by QuickLaTeX.com")
is indeed a co-cone, as defined above. For universality, assume  is another co-cone of the directed system . One needs to produce a (unique) morphism
is another co-cone of the directed system . One needs to produce a (unique) morphism  such that
such that  . On the dense subalgebra
. On the dense subalgebra  the morphism in question must then be defined by
the morphism in question must then be defined by
![\[\alpha: C \to \mathcal{B} \qquad \text{sending } ~ \alpha(\iota_i(a)) = g_i(a),\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-952b3c994d040a4a6681e3e9b9957181_l3.png "Rendered by QuickLaTeX.com")
so uniqueness follows by density of . One needs to check that  is well defined. Assume and are such that
is well defined. Assume and are such that  . We must show that
. We must show that  . By construction,
. By construction,
![\[\iota_i(a) = \iota_j(b) \qquad \Leftrightarrow \qquad \lim_{k>i,j} || f_{i,k}(a) - f_{j,k}(b)|| = 0\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-562d6dc538640b0534d63f28d7846dea_l3.png "Rendered by QuickLaTeX.com")
hence if , we have
\begin{array}{llr}
||g_i(a) – g_j(a)|| & = ||g_k(f_{i,k}(a)) – g_k(f_{j, k}(b))|| & \text{by definition of a colimit}\\
& \leq || f_{i, k}(a) – f_{j, k}(b) ||.&
\end{array}
Since was arbitrary, we get that  , and is well defined. We also need to check it is norm decreasing (since is not complete). This follows by
, and is well defined. We also need to check it is norm decreasing (since is not complete). This follows by
![\[||\alpha(\iota_i(a))|| = ||g_i(a)|| = || g_{k}(f_{i, k}(a))|| \leq || f_{i, k}(a)|| \xrightarrow{k > i } ||\iota_i(a)||.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-b59baa6aaf37785450562671f29d7e24_l3.png "Rendered by QuickLaTeX.com")
Now here is the definition of the projective limit of an inverse system of C*-albegras . Let be the projective limit of the underlying algebras (defined above). We define  to be the subalgebra given by
to be the subalgebra given by
![\[\mathcal{A} = \{ (a_i) \subset \mathcal{A}' ~ : ~ \sup_{i\in I} ||a_i|| < \infty \}\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-10ffd5b4b91c2ac7e0828b42a8fb1e03_l3.png "Rendered by QuickLaTeX.com")
The above defined algebra
is a C*-algebra with respect to the norm  , which, together with the natural projection maps
, which, together with the natural projection maps  projecting onto its i’th coordinate, is the limit of the inverse system . That is
projecting onto its i’th coordinate, is the limit of the inverse system . That is
![\[\mathcal{A} = \varprojlim (\mathcal{A}_i, f_{i,j}).\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-c19fe36a956cbd70270c67c5b5771f33_l3.png "Rendered by QuickLaTeX.com")
is indeed a C*-algebra. It is trivial to verify that  is a C*-norm on . The idea here is that if a sequence
is a C*-norm on . The idea here is that if a sequence  is Cauchy with respect to this norm, it is not hard to check that for all fixed
is Cauchy with respect to this norm, it is not hard to check that for all fixed  the sequence
the sequence  is also Cauchy, hence converges to some
is also Cauchy, hence converges to some  . Let
. Let  be element consisting of all these limits. Pick a
be element consisting of all these limits. Pick a  such that
such that
![\[||(a)^i - (a)^j|| < \frac{\epsilon}{2}.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-7ae1babbae89acee3962b6314c18f908_l3.png "Rendered by QuickLaTeX.com")
In particular for all  we have
we have  and taking supremums over all
and taking supremums over all  ‘s we get
‘s we get
![\[\sup_{r\in I}||a_r^i - b_r || = || (a)^i - (b) || \leq \frac{\epsilon}{2} < \epsilon.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-523cfeaae71be26dfee88f6a8188c2fe_l3.png "Rendered by QuickLaTeX.com")
This shows that  in the given norm.
in the given norm.
Some Generalizations
A closely related notion of the above, is that of a pro-C*-algebra (or local C*-algebras) which is just the projective limit of an inverse system of C*-algebras taken in the category of topological *-algebras. Another related concept is that of a  -C*-algebra, where the inverse system of C*-algebras is required to be countable and the limit is again taken in the category of topological *-algebras. These are not necessarily C*-algebras per se, and I will not delve into the theory here.
-C*-algebra, where the inverse system of C*-algebras is required to be countable and the limit is again taken in the category of topological *-algebras. These are not necessarily C*-algebras per se, and I will not delve into the theory here.
Lastly, I would also like to point out that there exists a notion of a generalized injective limit of C*-algebras, where the morphisms between the objects are not necessarily *-homomorphisms of C*-algebras, but their “asymptotic behavior” mirrors that of an ordinary *-homomorphism. For the precise definition consult the last section of Blackader’s book (Operator Algebras).
There is also another way to exhibit an isomorphism between limit C*-algebras and  , which is to find an interwining of the algebras. For injective limits when the index set is a sequence these are maps
, which is to find an interwining of the algebras. For injective limits when the index set is a sequence these are maps  and
and  (note the incremented index!) such that every “triangle” commutes when one sketches out the diagram. As one would expect the increment of 1 is arbitrary, one only needs a subsequence of such interwinings for the limit algebras to be isomorphic. One can make this ever weaker by introducing approximate interwining. Similar constructions could be carried out for projective limits directed index sets in the obvious way.
(note the incremented index!) such that every “triangle” commutes when one sketches out the diagram. As one would expect the increment of 1 is arbitrary, one only needs a subsequence of such interwinings for the limit algebras to be isomorphic. One can make this ever weaker by introducing approximate interwining. Similar constructions could be carried out for projective limits directed index sets in the obvious way.
Examples and duality
Some common injective limits are,
- Stalks and Germs: If
 is any topological space, the germ at a point
is any topological space, the germ at a point  of continuous functions is an equivalence relation on
of continuous functions is an equivalence relation on  given by
given by
![\[f \sim g \qquad \Leftrightarrow \qquad \text{there exists a neighbourhood } U \text{ of } p \text{ such that } f|_{U} = g|_{U}.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-6cc7a909be994d1e4a2eebe93c2bed64_l3.png "Rendered by QuickLaTeX.com")
The equivalence is “local” in nature, and appears when defining tangent spaces of manifolds (as germs of curves) or as elements in the stalks of (pre)sheaves. Generally, let
 be a (pre)sheaf of objects in any category where injective limits exists (groups, rings, algebras, R-modules, C*-algebras, …). The stalk of the (pre)sheaf at a point is denoted
be a (pre)sheaf of objects in any category where injective limits exists (groups, rings, algebras, R-modules, C*-algebras, …). The stalk of the (pre)sheaf at a point is denoted  and is defined as the injective limit:
and is defined as the injective limit:![\[\mathcal{F}_p := \varinjlim_{p\in U} (\mathcal{F}(U), res)\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-f4237e3f3ea875b2f6b52d01bdf63e1e_l3.png "Rendered by QuickLaTeX.com")
of the net indexed by all neighborhoods
 of
of  ordered by inclusion, with morphisms the usual restriction maps. Elements in are called germs at . For sheaves of continuous complex valued functions (C*-algebras) can you verify that the two definitions coincide, when the injetive limit is taken in the category of rings?
ordered by inclusion, with morphisms the usual restriction maps. Elements in are called germs at . For sheaves of continuous complex valued functions (C*-algebras) can you verify that the two definitions coincide, when the injetive limit is taken in the category of rings? - Distributions: Another common example is the topology on the space of test functions. Let be a locally convex space, and
 a countable compact exhaustion of . Let
a countable compact exhaustion of . Let  denote the space of all smooth functions on with support contained in , endowed with weak topology induced by the family of seminorms:
denote the space of all smooth functions on with support contained in , endowed with weak topology induced by the family of seminorms:
![\[||f||_\alpha = \max_{x\in K_i}|\partial^\alpha f(x)| \qquad \alpha \in \mathbb{N}.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-47f316b6e2ba94a1c451615adcf21d6d_l3.png "Rendered by QuickLaTeX.com")
The space of all test functions, denoted
 , can be defined as the limit in the category of locally convex space of the directed system
, can be defined as the limit in the category of locally convex space of the directed system  ordered by inclusion where
ordered by inclusion where  are the inclusion maps
are the inclusion maps  . That is
. That is![\[D(U) = \varinjlim (D_{K_i}, f_i)\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-31c93107580dbc081902c8616b221b52_l3.png "Rendered by QuickLaTeX.com")
- Given a unital ring A, and an element
 which is not invertible, the smallest extension of
which is not invertible, the smallest extension of  containing as a unit is the ring of fraction
containing as a unit is the ring of fraction  , where
, where  is the multiplicative subset
is the multiplicative subset
![\[S = \{0, p, p^2, ... \}, \qquad \text{and } \qquad S^{-1}A = \{ \frac{a}{p^n} ~|~ a\in A, ~n\in \mathbb{Z} \}.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-ec828cd9d3570dd99aa1f25065cb2d92_l3.png "Rendered by QuickLaTeX.com")
This ring is also given as the injective limit of the directed system
 , where by an slight abuse of notation
, where by an slight abuse of notation  denotes the multiplication by “p” map. The natural inclusion maps are given by
denotes the multiplication by “p” map. The natural inclusion maps are given by  sending
sending  .
. - p-adic rationals As an application of the previous example, the p-adic rationals is the ring of fraction given by the multiplicative subset
 of the p-adic integers
of the p-adic integers  (defined below) where is a positive prime number. It is hence also given as the injective limit of the directed system
(defined below) where is a positive prime number. It is hence also given as the injective limit of the directed system  where
where  is the multiplication by p map.
is the multiplication by p map.
And some common projective limits are
-
- p-adic integers here denoted , where is a positive integer, is a group of all formal sums of the form
 with the condition that
with the condition that  . It can also be given as the projective limit of the system, indexed by
. It can also be given as the projective limit of the system, indexed by  , whose objects are the groups
, whose objects are the groups
![\[\mathbb{Z}/p^n\mathbb{Z} = \{ 0, 1, ..., p^n - 1 \}\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-fae3966ce13e445f1570c6a8e49c226b_l3.png "Rendered by QuickLaTeX.com")
and whose morphisms are the maps
![\[f_{i}: \mathbb{Z}/p^{i+1}\mathbb{Z} \to \mathbb{Z}/p^{i}\mathbb{Z} \qquad \text{given by } \qquad r \mapsto r ~ (mod ~p^{i+1}).\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-51d95075b0a8793f672580af52615330_l3.png "Rendered by QuickLaTeX.com")
For a proof of the equivalence of these definitions see the first theorem of section 4.7 of Walter’ now classic book “A course in p-adic analysis”.
- p-adic solenoid The p-adic solenoid
 is defined as the projective limit of the system
is defined as the projective limit of the system  , where
, where  sends
sends  . That is
. That is
![\[S = \{ (z_i) \in \prod_{i\in \mathbb{N}} S^1 ~| ~ z_i = z_{i+1}^p \}.\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-35bdff0b7d86743c4202c7a9a79cd96e_l3.png "Rendered by QuickLaTeX.com")
There often is a correspondence between colimit objects and limits of dual objects, that is, if
 is the injective limit of locally compact abelian groups
is the injective limit of locally compact abelian groups  , the dual group
, the dual group  of is the projective limit of the inverse system
of is the projective limit of the inverse system  where the
where the  is the dual groups of
is the dual groups of  and
and  is the lift of .
is the lift of .The abstract justification for this is that the Pontryagin dual functor, which sends a group to its dual group, is (by its very definition) a contravariant representable functor hence sends colimits to limits. As such we could have written the p-adic solenoid above as a certain projective limit of so called Prüfer p- groups (the dual groups of the p-adic integers), but no, let’s not. The same holds for the functor sending a vector space to its dual.
For another example of duality in action, more relevant to the scope of the blog, the assignment of a compact Hausdorff space to a commutative unital C*-algebra (via the Gelfand transform) is known to be a (contravariant) equivalence of categories and hence preserves both limits and colimits. As a consequence if
 is a directed system compact Hausdorff with
is a directed system compact Hausdorff with ![\[X = \varinjlim (X_i, f_{i, j}),\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-91065847c8f96e7a5d5bdb77e18ce581_l3.png "Rendered by QuickLaTeX.com")
then for the corresponding inverse system
 of C*-algebras we have the projective limit
of C*-algebras we have the projective limit ![\[C(X) = \varprojlim (C(X_i), f_{i, j}^*)\]](https://www.mathblog.realhjelp.no/wp-content/ql-cache/quicklatex.com-76a21ecc68d06bff8bc4233057560ccd_l3.png "Rendered by QuickLaTeX.com")
where
 is the usual lift of .
is the usual lift of .In the future I hope to be able to cover some more concrete properties of these limits, which might be more useful in applications, and show how they are employed to define so called AF algebras and UHF algebras. If you find any mistakes, or have a nice example of use of projective/injective limits that gets used in analysis, let me know by pm or in the comments below and I will add them to the list.
- p-adic integers here denoted